在《復(fù)仇者聯(lián)盟4》中,,當(dāng)眾多超級英雄面對滅霸的大軍,難以招架之時,,鋼鐵俠抓住了奇異博士所預(yù)言的千萬分之一的機(jī)會,,打響響指,犧牲自己,,拯救了宇宙中一半的生命,。這一個響指是英雄史詩式的,同時也為鋼鐵俠這一人物形象畫上了圓滿的句號,。

實(shí)際上,,幾千年來,打響指這一動作一直存在于人類文化中,,古人通常將其作為一種交流和音樂的形式進(jìn)行使用,。最早的關(guān)于打響指的記載可以追溯到公元前320年的希臘,那里的一件陶器描繪了荒野之神,蜷縮起右手打響指的姿勢(圖1a),。
此外,,古希臘人普遍使用打響指來打節(jié)拍。然而,,響指并不局限于一種文化,。它在創(chuàng)造尖銳聲音方面的簡單性和有效性已被納入許多文化中,包括西班牙的弗拉門戈舞,,以及眾多的影視作品當(dāng)中,。今天,響指更是具有廣泛的應(yīng)用,,例如打招呼的手勢(類似于握手),,用于多個麥克風(fēng)的同時定位,用于盲人的回聲定位,,或用于數(shù)字設(shè)備的生物識別認(rèn)證,。

鑒于此,佐治亞理工學(xué)院M. Saad Bhamla團(tuán)隊(duì)利用高速攝像和力傳感器,,對打響指的工作進(jìn)行了動力學(xué)分析,,揭示了皮膚摩擦力的核心作用。
作者還開發(fā)了一個基于摩擦力的柔性可壓縮閂鎖介導(dǎo)的彈簧驅(qū)動模型,,并進(jìn)一步闡明摩擦力與可壓縮閂鎖的相互作用,。該工作揭示了表面之間的摩擦力對閂鎖系統(tǒng)的調(diào)控作用,并為許多機(jī)器人和超快速能量釋放結(jié)構(gòu)中基于摩擦力的復(fù)雜設(shè)計(jì)提供了一定的啟示作用,。該研究以題為“The ultrafast snap of a finger is mediated by skin friction”的論文發(fā)表在最新一期《Journal of the Royal Society Interface》上,。11月17日,該論文被Nature以“It’s a snap: the friction-based physics behind a common gesture”為題,,作為亮點(diǎn)報道,。


【打響指過程的動力學(xué)分析】
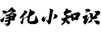
作者利用高速攝像和力傳感器,分析了打響指的動力學(xué)狀態(tài),。通過放置在中指和拇指之間的觸覺壓力傳感器進(jìn)行力的測量,并利用高速攝影機(jī)在手腕,、指節(jié)和指尖上的各點(diǎn)之間進(jìn)行角度測量,,作者發(fā)現(xiàn),打響指的動作在7毫秒內(nèi)達(dá)到了1.6×106°s-2的峰值角加速度,。接著,,作者在拇指和中指上覆蓋不同的材料以產(chǎn)生不同的摩擦系數(shù)和不同的可壓縮性,揭示了皮膚摩擦力的核心作用,,并將打響指動作抽象成一個閂鎖介導(dǎo)的彈簧驅(qū)動(latch-mediated spring-actuated,,LaMSA)系統(tǒng)。
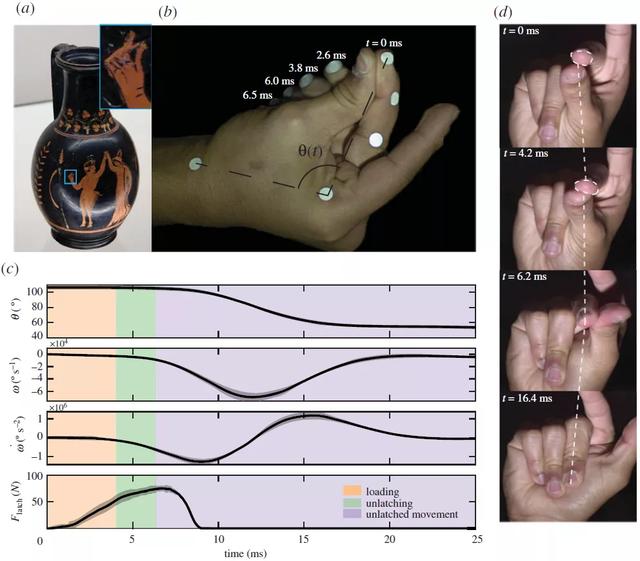
圖1. 打響指是一個三相的、以一維為主的運(yùn)動,,具有超高的速度和加速度,。(a) 一件公元前320-310年的陶器,描繪了希臘的野性之神潘,,打響指的姿勢,。(b) 從側(cè)面看,打響指不同時間點(diǎn)的運(yùn)動的綜合圖像,。(c) 響指的運(yùn)動學(xué)和動力學(xué),。(d) 從正面拍攝的打響指照片。
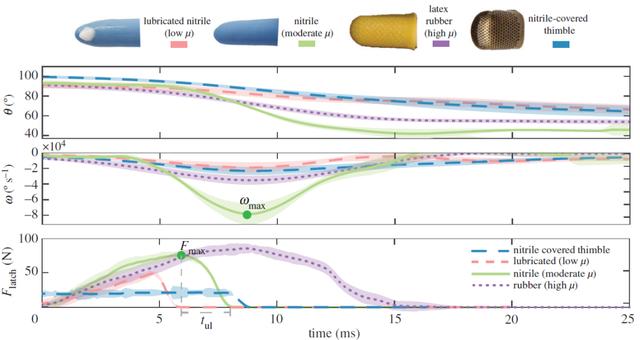
圖2. 摩擦和壓縮對打響指的影響,。手指覆蓋在潤滑的丁腈橡膠(低μ,,粉紅色)、丁腈橡膠(中等μ,,綠色),、乳膠橡膠(高μ,紫色)和丁腈橡膠頂針(低接觸面積,,藍(lán)色)上的角位移,、速度和法向力
作者發(fā)現(xiàn),當(dāng)拇指和手指之間的表面摩擦適中時,,可產(chǎn)生最高的速度和加速度,。用Fmax表示儲存在手指系統(tǒng)內(nèi)生理彈簧所受的力的大小。Fmax隨不同摩擦面發(fā)生如下變化,。當(dāng)摩擦系數(shù)μ越大,,上述彈簧中可儲存的力就越大。作者將tul定義為兩個手指從第一次運(yùn)動開始的接觸時間,,它是衡量因摩擦而損失多少能量的一個良好指標(biāo),。tul隨著μ的增加而增加,表明隨著摩擦的增加,,更多的能量被損耗,。實(shí)驗(yàn)結(jié)果表明,使用丁腈橡膠作為接觸面的最大速度ωmax最高,,與潤滑丁腈橡膠(低μ)和乳膠橡膠(高μ)相比,,它的摩擦系數(shù)適中。
圖3. 拇指和手指之間適中的表面摩擦可產(chǎn)生最高的速度和加速度,。(a) Fmax隨不同摩擦面的變化,。(b) tul隨不同摩擦面的變化。tul被定義為兩個手指從第一次運(yùn)動開始的接觸時間,,因此是衡量因摩擦而損失多少能量的一個良好指標(biāo),。(c) ωmax隨不同摩擦面的變化,。
【打響指過程的模型建立】
作者將打響指的過程抽象為閂鎖介導(dǎo)的彈簧驅(qū)動(LaMSA)系統(tǒng)。LaMSA系統(tǒng)是指在一個相對較長的時間內(nèi),,能量被外部電機(jī)加載到質(zhì)量彈簧系統(tǒng)中,,然后被鎖扣固定住。當(dāng)閂鎖被迅速釋放時,,就實(shí)現(xiàn)了超高速運(yùn)動,,使儲存的勢能在相對較短的時間內(nèi)爆炸性地發(fā)射物塊。
在打響指的過程下,,作者假設(shè)手臂肌肉為馬達(dá),,在手指和手臂的肌腱作用下加載勢能,這些肌腱就像彈簧一樣(圖1b),。中指和拇指之間的皮膚摩擦力有助于中指的鎖定,,但也阻礙了解鎖和運(yùn)動,在打響指的動態(tài)過程中起著雙重作用,。系統(tǒng)在最開始時,,彈簧被壓縮,負(fù)載和閂鎖位于θ0的角度,。當(dāng)解鎖電機(jī)作用于鎖扣時,,系統(tǒng)就會移動,導(dǎo)致負(fù)載在正Y方向加速,,直到達(dá)到解鎖時間,,也就是鎖扣和負(fù)載最后一次接觸的時間。在這之后,,負(fù)載繼續(xù)加速,,完全是由于彈簧的力量,沒有其他力量作用于它,。這種情況一直持續(xù)到解鎖時刻,,也就是達(dá)到彈簧平衡位置的時候。在這一點(diǎn)上,,負(fù)載繼續(xù)移動,,沒有任何外力。
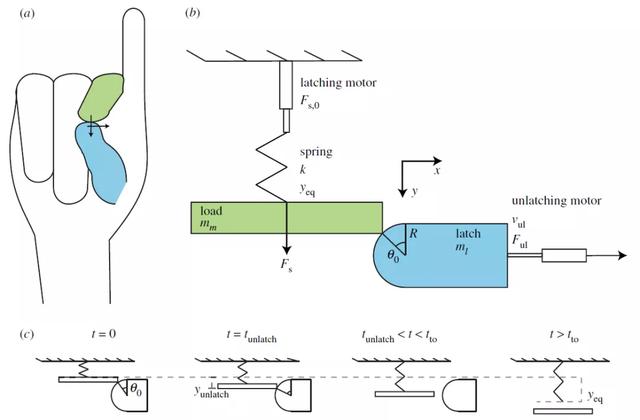
圖4. 打響指的模型是一個一維閂鎖彈簧系統(tǒng),。(a) 打響指的示意圖,。(b) 類比于傳統(tǒng)的鎖存器介導(dǎo)的彈簧驅(qū)動系統(tǒng)。(c) 這些示意圖展了該系統(tǒng)隨時間的演變,。
【模型結(jié)果的分析】
作者研究了在最佳摩擦系數(shù)μ的情況下產(chǎn)生最大的初始速度。在系統(tǒng)解鎖前,,負(fù)載的質(zhì)量不斷增加,。在系統(tǒng)解鎖之后,,負(fù)載質(zhì)量遵循簡單的諧波運(yùn)動,直到達(dá)到最大速度,,達(dá)到這一個點(diǎn)后,,它從彈簧上脫離,并以這個速度繼續(xù)運(yùn)動,。該模型顯示最佳的μ為0.20,,當(dāng)μ低于或高于該值時,最大速度會下降,。而作用在負(fù)載質(zhì)量上的法向力在減少到零之前從最大值緩慢下降,。前面提到的最佳μ產(chǎn)生最低的tul,而較低和較高的μ會導(dǎo)致較高的tul,。該模型的結(jié)果與實(shí)驗(yàn)趨勢一致,。
作者通過能量分析,確定該最佳的μ可以被應(yīng)用于任何通用的系統(tǒng),,從而使該分析適用于其他基于摩擦的LaMSA系統(tǒng),。圖6顯示的是負(fù)載K達(dá)到的最大動能(黑線),初始彈簧勢能U(藍(lán)色),,以及模型中每個點(diǎn)μ的能量耗散Ed(紅色),。隨著μ的增加,初始彈簧勢能U增加,,直到達(dá)到系統(tǒng)的最大存儲能力,,而最大動能Kmax在減少之前達(dá)到一個峰值。作者計(jì)算了現(xiàn)象學(xué)模型的勢能和耗散的能量相對于μ的導(dǎo)數(shù)(dU/dμ和dEd/dμ),??梢钥闯觯琄的峰值發(fā)生在dU/dμ和dEd/dμ相交的μ處,,這一點(diǎn)標(biāo)志著系統(tǒng)從加載主導(dǎo)的模式過渡到耗散主導(dǎo)的模式,。
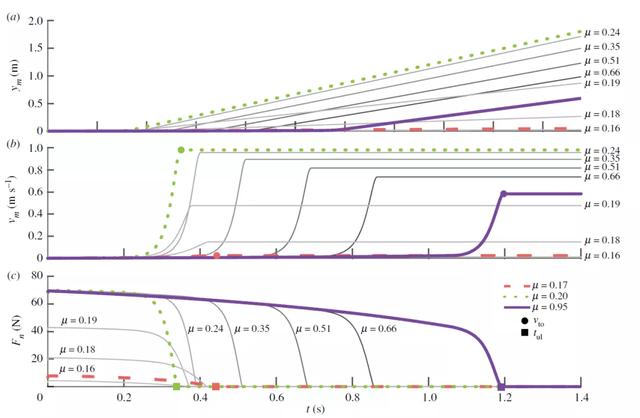
圖5. 該模型的輸出結(jié)果與實(shí)驗(yàn)結(jié)果一致。
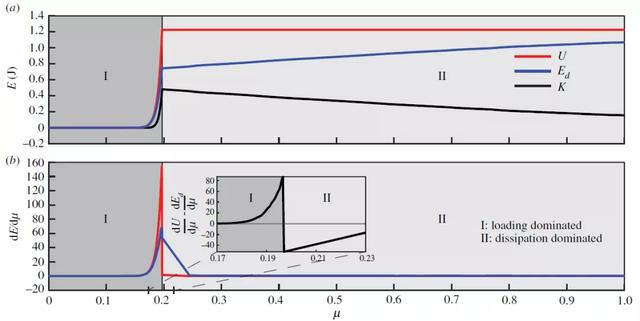
圖6. 速度峰值vto可以通過能量分析來預(yù)測,。
官方微信
TOP